Abonnements
Abonnements
18 November 2015 |
La Revue POLYTECHNIQUE 09/2015 |
Mikrotechnik
Guidages flexibles
Edouard Huguelet
Cet article constitue un reflet de quelques aspects du cours de post-formation dont le sujet est «Les guidages flexibles», organisé par la FSRM (www.fsrm.ch). Ce cours, qui est réédité annuellement, a pour enseignant Simon Henein, professeur et directeur de l’Instant–Lab de l’EPFL (STI-IMT) à Neuchâtel.
Guidages flexibles, en anglais «Flexure Mechanisms». Je traduirais plutôt par «Systèmes à cinématique élastique». Il s’agit effectivement de solutions de transmission et transformation de mouvements tirant parti de la propriété élastique des matériaux, lesquels peuvent être en l’occurrence de l’aluminium, du titane, de l’acier, de l’alliage cuivreux, du silicium, etc.


|
Pièce réalisée au CSEM.
|
Des systèmes exploitant l’élasticité des matériaux
Essentiellement, dans les mécanismes traditionnels, nous trouvons des solutions comportant entre autres des leviers, des axes de transmission, des pivots, des glissières, des vis à billes, etc. Ils sont peu aptes à être utilisés dans des applications du domaine des microtechniques. Les systèmes à cinématique flexible eux sont des éléments monolithiques exploitant l’élasticité des matériaux. De ce fait ils ne sont pas sujets au frottement, peuvent fonctionner dans le vide, sont quasiment insensibles aux vibrations ou aux différences de température et n’ont pas besoin de lubrification, ce qui les prédestine idéalement à certaines applications bien spécifiques, telles que l’aérospatiale, l’astrophysique, l’optique, l’interférométrie, la microtechnique (dont l’horlogerie), l’industrie des capteurs, la technique médicale, l’instrumentation de mesure, l’appareillage scientifique, etc. Ils peuvent fonctionner à des précisions sub-microniques, voire même nanométriques. Seule restriction notable: ils sont par principe conçus pour des courses réduites (quelques centimètres au plus).

|
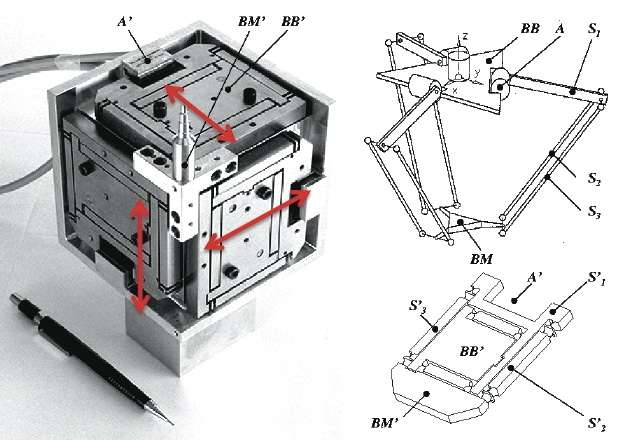
Robot Delta Cube (structure classique équivalente à droite en haut). En bas à droite, structure de l’organe terminal (bloc mobile).
Source: Conception des guidages flexibles – Simon Henein.
|
Un exemple tiré de l’industrie: des robots complets à géométrie Delta, appelés Delta Cube, conçus en technique monolithique, qui sont activés par des actionneurs électromagnétiques (des moteurs linéaires en l’occurrence) avec mesure de position par règles optiques, assurant une définition de 50 nanomètres. Ils sont utilisés pour des opérations de positionnement ultra-précis dans le domaine de l’usinage par électro-érosion.
Un autre exemple, le robot Sugar Cube à géométrie Delta (fig. 1), développé au CSEM, qui serait, avec ses dimensions de seulement 20 x 20 x 20 mm, le robot Delta le plus compact au monde. Doté de trois degrés de liberté et mû par des actuateurs, il comporte des guidages flexibles en silicium monocristallin et un dispositif de mesure de position en boucle fermée.






|
Quelques structures de base
L’une des structures de base les plus simples pour la réalisation de systèmes à cinématique flexible consiste en une réalisation comportant un bloc fixe, deux lames fines parallèles et une table, le tout de conception monolithique (fig. 2). Plusieurs structures élémentaires (voir fig. 3) peuvent être combinées pour constituer des mécanismes de complexités diverses, pour réaliser des fonctions complètes.
Pour éviter le flambage des lames, leur partie centrale peut être renforcée (fig. 4). Ces lames peuvent même être réalisées selon le principe (conception à col circulaire) de la fig. 5.
Les systèmes monolithiques sont usinés par fraisage, par découpage au jet d’eau (water microjet) ou sur des machines d’électro-érosion à fil. Pour la détermination des contraintes des systèmes et définir leurs limites d’utilisation, il est fait usage d’un module informatique spécifique tirant parti des éléments finis, tel le logiciel ANSYS fourni par Cadfem (fig. 6).
|
Pour approfondir le sujet
Ouvrage (e-book) «Conception des guidages flexibles». Auteur: Simon Henein,
Il s’agit d’un e-book que l’on peut commander aux PPUR (Presses polytechniques et universitaires romandes – www.ppur.org) – Collection META. Il. Basé sur la thèse de doctorat de l’auteur, il a pour objectif essentiel d’établir les bases d’une méthode générale de conception des structures articulées à guidages flexibles de haute précision.
Né en 1973, de nationalités suisse et égyptienne, Simon Henein effectue sa scolarité au Caire. Il obtient son diplôme d’ingénieur en microtechnique de l’École polytechnique fédérale de Lausanne (EPFL) en 1996, puis le titre de docteur ès sciences techniques de cette même institution en 2000.
En 2001 il publie un livre intitulé «Conception des guidages flexibles» qui devient une référence dans le monde de la conception micromécanique. Il s’engage ensuite professionnellement au Centre Suisse d’Électronique et de Microtechnique (CSEM) où il conçoit et développe des mécanismes dédiés à des applications robotiques, spatiales, astrophysique, biomédicales et horlogères ainsi qu’à l’Institut Paul Scherrer où il développe des instruments pour le synchrotron suisse SLS.
Depuis le 1er novembre 2012, il est professeur associé en microtechnique à l’EPFL où il dirige le laboratoire de conception micromécanique et horlogère Instant-Lab.
|