Abonnements
Abonnements
03 November 2014 |
La Revue POLYTECHNIQUE 09/2014 |
Automatisierung
Réseaux de machines
Thomas Waggershauser*
CAN FD est un nouveau concurrent pour les bus de terrain et l’Ethernet industriel dans les machines spéciales. Ce système permet d’utiliser les systèmes et données CAN existants, même avec des besoins complexes en termes de nombre de nœuds, de débit et de temps de cycle.
La demande croissante en termes de nombre de raccordements, de débit et de temps de cycle provoque des goulets d’étranglement que les limitations du protocole CAN standard (8 octets de données et 1 Mbit/s de débit) ne sauraient résoudre: le débit, qui dépend de la taille du réseau, ainsi que la longueur et le caractère analogique des données, étant insuffisants.

|
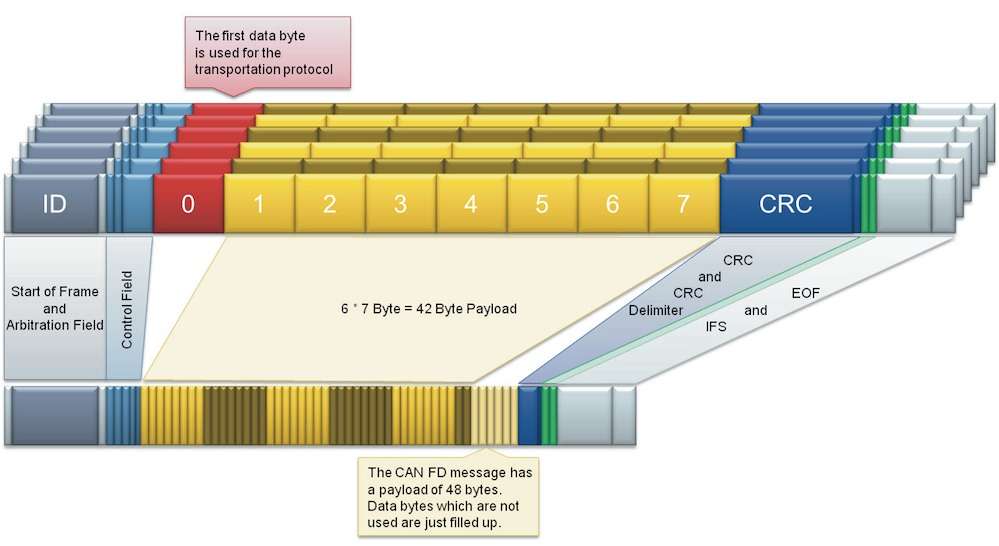
Avantages de CAN FD 1. Dans cet exemple, 42 octets de données de configuration sont transmis au total. Pour réaliser cela dans un réseau CAN classique, un protocole de transport doit être utilisé pour transmettre la totalité des données dans des messages de 8 octets.
|
Les compromis ne résolvent pas tout
Au quotidien, ces limitations sont souvent contournées à l’aide de compromis. Le système peut par exemple être divisé en plusieurs segments de réseau dans différentes applications, voire en réseaux parallèle, mais avec ces méthodes, la technique existante est exploitée de manière intensive en permanence, ce qui aboutit souvent à des solutions complexes et coûteuses (appelées familièrement «usines à gaz» pour ce qui est de la configuration, l’installation et la maintenance.
A priori, le passage aux solutions Ethernet industriel est possible, mais le niveau d’investissement généralement nécessaire et la modification des structures de données et du mode de raisonnement pour la configuration, notamment dans les systèmes contrôlés par horodatage, constituent un obstacle, en particulier dans le cas des réseaux étendus. En outre, un changement d’outils de développement, de mise en service et d’entretien est nécessaire, ce qui dissuade souvent les utilisateurs de procéder à une conversion complète.
Tirer parti des acquis
Dans le même temps, il faut pouvoir continuer à tirer parti des connaissances acquises. C’est là que CAN FD entre en jeu: cette version à débit de données souple est en fait une extension du protocole CAN standard introduit par Bosch en 2012, qui augmente considérablement le débit et la longueur de données utilisables. CAN FD conserve les caractéristiques de la version standard: arbitrage en fonction des identificateurs de message, distribution de messages en fonction d’événements et reconnaissance des messages par bit d’acquittement.
Amélioration du débit de données
La reconnaissance des messages par les récepteurs, utilisée dans la version standard de CAN, fournit plusieurs avantages en confirmant la transmission directement dans le message transmis. Les erreurs potentielles de transmission sont de la sorte détectées rapidement et les données peuvent être renvoyées immédiatement.
L’arbitrage des messages en fonction de l’identificateur CAN présente aussi des avantages pour les applications de contrôle, en empêchant les collisions en cours de transfert et en garantissant une faible latence pour les messages prioritaires, même en cas de charge élevée sur le bus.
Les méthodes employées présentent toutefois un inconvénient: au moment de l’échantillonnage, un même niveau de bus doit être appliqué à tous les nœuds pour éviter les erreurs. En conséquence, l’intervalle de bit doit prévoir un délai suffisant pour la propagation du signal entre les deux raccordements les plus éloignés au sein du réseau, y compris pour l’activation de leur bus.
L’intervalle de bit, et par conséquent le débit de données, sont donc directement de la taille du réseau. À 40 m, un débit de 1 Mbit/s est encore envisageable, mais à 250 m, ce chiffre peut tomber à 250 kbit/s, ce qui est en principe insuffisant.
Augmenter le débit des données sans tout chambouler
Pour augmenter massivement le débit de données sans changer la solution de communication existante, CAN FD utilise deux débits binaires distincts. D’abord le «débit d’arbitrage» pour les commandes de contrôle (arbitrage, type de message, détection de la terminaison et reconnaissance) dépend de la vitesse de propagation, et donc de la taille du réseau. Ensuite, le second, «débit binaire de données» peut aussi être utilisé pour le contenu et la protection des données. À cet instant, seul l’émetteur du message occupe le bus, ce qui signifie qu’une réponse directe dans le délai du bit est inutile. Le débit de données maximal pouvant être atteint ne dépend donc plus que des caractéristiques de transmission de l’émetteur, et non de la propagation du signal. À l’heure actuelle, les réseaux CAN FD permettent des utilisations productives jusqu’à 8 Mbit/s, sachant que la norme CAN FD permet un maximum de 15 Mbit/s. Ce débit binaire a aussi été utilisé avec succès dans différents systèmes de test. Les deux débits de données sont définis indépendamment dans le contrôleur à l’aide de deux registres de durée de bit. Le passage d’un débit de données à l’autre s’effectue à l’aide de deux bits de contrôle dans le protocole. Le premier bit réservé jusqu’à maintenant est utilisé comme bit EDL (Extended Data Length). Il définit le message CAN FD en raison de son niveau récessif. Le changement effectif de débit binaire est effectué en ajoutant un nouveau bit appelé BRS (Bit Rate Switch), qui active le passage au débit binaire supérieur lors de son échantillonnage. Le retour au débit binaire inférieur est effectué lors de l’échantillonnage du bit de restriction CRC.

|
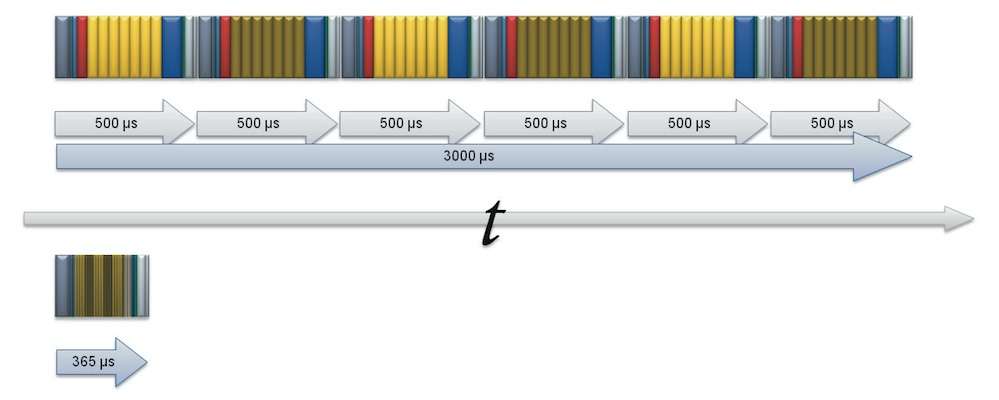
Avantages de CAN FD 2. La transmission des données bien plus rapide améliore aussi le comportement en temps réel des systèmes CAN grâce aux temps de réponse bien plus courts, et dans le même temps augmente le débit de données et réduit la complexité de l’administration des données.
|
Données d’utilisateur étendues
Les données de contrôle sont toujours transmises à l’aide des débits binaires inférieurs habituels, ce qui limite les débits de données maximaux. En augmentant les données utilisateur jusqu’à 64 octets, un volume supérieur de données peut être envoyé en mode de transfert rapide, ce qui augmente efficacement le débit. CAN standard fournit seulement 8 octets de données, ce qui est désormais insuffisant pour de nombreuses applications, par exemple pour la transmission de valeurs analogiques de haute précision ou pour le contrôle d’un robot à plusieurs axes numériques, nécessitant diverses valeurs d’encodage et commandes de servomoteurs. Il faut aussi ajouter à cela les données de service, ce qui jusqu’à présent réduisait l’efficacité, en raison des protocoles de transport requis pour la transmission de plus de 8 octets.
CAN FD permet d’utiliser désormais jusqu’à 64 octets de données. Des blocs de données plus importants peuvent ainsi être transmis dans un seul message. Dans le cas des données de processus notamment, des appareils plus complexes peuvent désormais être contrôlés entièrement à l’aide d’un seul message de processus. Pour les données de service, la nécessité des protocoles de transport est réduite, un seul message CAN FD suffisant généralement pour les données de configuration et similaires.
Eviter l’inflation des données
Pour empêcher l’expansion superflue des données de contrôle, CAN FD n’utilise que 4 bits pour le code de longueur des données. Les valeurs comprises entre 0 et 8 proviennent directement de CAN standard. Les valeurs auparavant non définies (de 9 à 15, c’est-à-dire de 1001 à 1111) sont désormais utilisées pour les nouvelles longueurs de données étendues: outre la plage de 0 à 8 octets, 12, 16, 20, 24, 32, 48 et 64 octets sont désormais également disponibles pour les données d’utilisateur. Les longueurs de données qui diffèrent de ces valeurs ne sont pas possibles: les zones inutilisées doivent être documentées à l’aide de valeurs de remplissage.
Outre la transmission rapide de la zone de données, le débit de données effectivement utilisable peut être réduit de manière importante à l’aide de CAN FD, et le temps de cycle peut aussi être réduit considérablement. De cette façon, un réseau CAN FD avec 500 kbit pour l’arbitrage, 4 Mbit pour la transmission des données et 64 octets de données peut atteindre un débit de données effectif de plus de 5 Mbit/s.
Capacités en temps réel
Avec le regroupement de plusieurs paquets de données indépendants dans un seul message, l’administration des données est considérablement simplifiée, car il n’est plus nécessaire de synchroniser les messages entre eux, ce qui représentait un surcoût important. La transmission rapide de paquets de données plus importants que dans les réseaux CAN classiques permet de transférer huit fois le volume de données (64 octets) dans le temps nécessaire à l’envoi d’un message CAN standard de 8 octets. De cette façon, les messages prioritaires peuvent être transmis bien plus rapidement et les capacités en temps réel améliorées.
Sécurité des données
La sécurité des données est essentielle. Malgré la taille accrue des paquets de données par rapport au CAN classique, CAN FD a les mêmes besoins en matière de protection des données. Ces besoins sont traités en utilisant par exemple des clés de vérification CRF plus longues avec des algorithmes adaptés. En fonction du nombre d’octets de données transmis, l’un de trois algorithmes CRC est utilisé: la formule CRC existante pour les messages de 8 octets de données maximum, ainsi que deux algorithmes améliorés prenant en charge les messages de 16 octets de données et plus. L’algorithme devant être utilisé par le contrôleur CAN est déterminé par le code de longueur des données.
Pour renforcer la protection des données, des suggestions supplémentaires ont été implémentées. Ainsi, le CRC dans les messages CAN FD commence toujours par un bit de bourrage. Après 5 bits de plus, un bit de bourrage supplémentaire est inclus. Contrairement à la règle du bit de bourrage dans CAN, cette opération ne dépend pas de la valeur des bits précédents. Chaque bit de bourrage a une valeur complémentaire du bit précédent.
Rétrocompatibilité
Le passage de CAN à des systèmes de communication plus rapides nécessite une conversion complète: tous les participants CAN doivent être adaptés au nouveau système, par exemple EtherCAT. Le contrôleur de la machine peut aussi être étendu pour utiliser divers réseaux hétérogènes.
Les deux procédures comportent des avantages et des inconvénients. Avec CAN FD, une option supplémentaire, moins radicale, existe désormais: grâce à la possibilité d’utiliser les contrôleurs CAN FD en tant que nœuds CAN classiques, tous les nœuds du réseau peuvent être remplacés progressivement par des appareils compatibles CAN FD. Dès que la totalité du réseau est compatible CAN FD, il devient possible de tirer pleinement parti de tous les avantages de CAN FD. Cela est particulièrement intéressant pour les machines spécialisées, car des participants au réseau qui ne peuvent pas être remplacés par des nœuds disponibles sont souvent aussi utilisés dans ces applications, en particulier les équipements spécifiques au client ou développés en interne.
Outils disponibles
Plusieurs solutions sont disponibles pour le développement d’équipements et réseaux CAN FD, notamment des cartes d’interface PC-CAN FD pour un grand nombre d’interfaces PC, par exemple les cartes PCIe IXXAT CAN-IB 500/600 de HMS Networks. Ces cartes CAN, qui incluent une gamme complète de packs de pilotes pour Windows, Linux et d’autres systèmes d’exploitation, facilitent la connexion avec les systèmes existants et permettent d’ajouter rapidement des logiciels existants aux réseaux CAN FD, car elles sont compatibles CAN et CAN FD.
Outre les interfaces matérielles dotées des pilotes nécessaires, des outils de test et d’analyse sont nécessaires pour l’implémentation efficace de CAN FD. Dans ce domaine, HMS proposera bientôt une nouvelle solution complète proposée avec une version compatible CAN FD de l’outil IXXAT canAnalyser.
Tout spécialement dans le secteur industriel
Hormis les outils déjà cités, d’autres aspects importants doivent être pris en compte pour l’utilisation de CAN FD dans un environnement de production. Il est recommandé d’appliquer des protocoles plus généraux et standardisés pour l’utilisation dans les applications industrielles: dans CiA (CAN in Automation), la tâche est réalisée en convertissant CANopen en CAN FD. La spécification CANopen V5, qui contient aussi des extensions pour CAN FD, est attendue sous peu.
Autre paramètre important pour l’utilisation de CAN FD: le nombre important de microcontrôleurs à contrôleur CAN/CAN FD intégré peu coûteux. Les équipements disponibles jusqu’à présent utilisent pour la plupart des FPGA à cœur IP CAN FD. Les microcontrôleurs à logique CAN FD intégrée sont généralement des composants hautes performances à processeurs multiples destinés aux dispositifs de contrôle installés dans les véhicules. D’ici à ce que des microcontrôleurs simples et économiques compatibles CAN FD soient disponibles, les systèmes FPGA continueront de représenter la solution la plus souple.
Perspectives
CAN FD étend le champ d’application des solutions CAN en fournissant des débits de données bien supérieurs, une configuration simple et la conservation des fonctions d’analyse des bus de terrain classiques. Avec l’arrivée imminente de CANopen pour CAN FD, le nouveau système réseau va pouvoir être utilisé dans le secteur industriel et fournir une solution efficace pour les réseaux avec un débit de données de 100 kbit/s à 5 Mbit/s. Grâce à la possibilité d’utiliser des débits de données supérieurs ou l’infrastructure de données étendue séparément ou en association, la conception flexible de CAN FD rend cette solution idéale en tant que système de bus de terrain adaptable pour les machines spéciales.
Distributeur de HMS en Suisse:
Gateweb GmbH
8306 Brütisellen
Tél.: 044 833 37 13
http://www.gateweb.net
* Directeur commercial chez IXXAT Automation GmbH, société du groupe HMS