Subscriptions
Subscriptions
16 september 2019 |
La Revue POLYTECHNIQUE
Développement des technologies destinées aux véhicules autonomes
On assiste actuellement à une forte poussée du développement des technologies destinées aux véhicules autonomes, afin de rendre les routes plus sûres et la conduite plus performante. Le groupe de recherche sur le mouvement du Centre de recherche automobile (WatCAR) de l’Université de Waterloo travaille sur un projet de véhicule autonome visant à améliorer la conduite sans chauffeur dans des conditions météorologiques extrêmes et à éviter des obstacles lors des manœuvres d’urgence.
Cet article présente le projet d’une équipe de recherche de l’Université de Waterloo au Canada, qui utilise les logiciels Maple et MapleSim pour le développement d’un véhicule autonome.Le groupe de recherche sur le mouvement du Centre de recherche automobile (WatCAR) de l’Université de Waterloo a fortement contribué à ces recherches, en travaillant sur un projet dirigé par les professeurs Krzysztof Czarnecki et Steven Waslander.




| L’équipe de chercheurs de l’Université de Waterloo a équipé une Lincoln MKZ Hybride 2015 de capteurs et actionneurs pour le développement d’un véhicule autonome. |
Un projet de véhicule autonome à commande électronique
Connu sous le nom d’Autonomoose, il s’agit d’un projet de véhicule autonome à commandes électriques. Parmi ses objectifs figurent l’amélioration de la conduite sans chauffeur dans des conditions météorologiques extrêmes, ainsi que l’esquive d’obstacles lors des manœuvres d’urgence.
«Notre équipe compte de nombreux chercheurs travaillant sur les véhicules autonomes et nous souhaitions bénéficier d’une plate-forme véhicule concrète sur laquelle tester nos nouvelles théories de recherche et nos algorithmes. Nous œuvrons pour l’avenir des transports automobiles en disposant désormais d’une plate-forme véhicule d’avant-garde sur laquelle tester les performance réelles de nos théories et de nos contrôleurs», explique Krzysztof Czarnecki.
Les professeurs Krzysztof Czarnecki et Steven Waslander contribuent depuis deux ans au projet, dont ils supervisent la planification et les recherches sur la navigation. Ils ont récemment fait appel à John McPhee, titulaire d’un titre de recherche au Canada et professeur en ingénierie et conception de systèmes à l’Université de Waterloo, pour améliorer le contrôleur de mouvement du véhicule et superviser la dynamique et les aspects de contrôle du projet.

| On assiste actuellement à une forte poussée du développement des technologies destinées aux véhicules autonomes. |
Une Lincoln MKZ Hybride 2015 équipée de capteurs et actionneurs
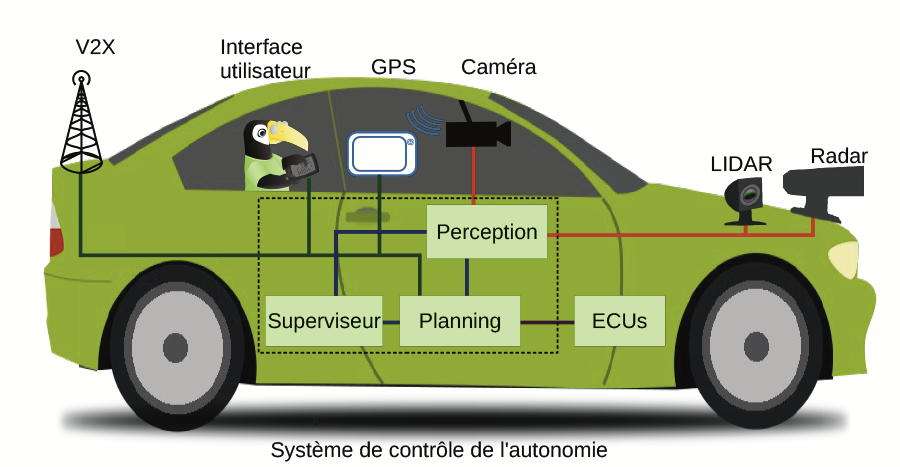
L’équipe de chercheurs a choisi une Lincoln MKZ Hybride 2015 comme plate-forme véhicule et a utilisé les logiciels Maple et MapleSim de Maplesoft pour ses recherches. Elle a équipé la voiture de capteurs et actionneurs indispensables à la mise en œuvre d’un véhicule autonome. «La Lincoln MKZ est le véhicule privilégié par AutonomouStuff, la société qui l’a transformé en véhicule à commande électronique. Nous avons pu ensuite ajouter nos propres capteurs (lidars, caméras, etc.) et systèmes de contrôle pour assurer l’autonomie totale du véhicule», confie John McPhee.
Des outils de modélisation, de simulation et de calcul
L’équipe a choisi l’outil de modélisation et de simulation MapleSim de Maplesoft, pris en charge par l’outil de calcul symbolique Maple. Le logiciel MapleSim offre une plate-forme de simulation complète pour développer et tester les modèles de véhicule. Quant à l’outil Maple, sa vitesse de calcul permet à l’équipe d’effectuer très vite les calculs nécessaires. L’équipe avait besoin de simulations rapides et de contrôleurs à base de modèles pour réaliser le contrôle en temps réel des mouvements du véhicule et tester les capteurs. Il lui fallait également un environnement de simulation puissant pour analyser les algorithmes de navigation.
Ces logiciels ont permis de créé des modèles qui ont été validés au moyen d’essais sur quatre colonnes, sur un dynamomètre roulant, sur la piste d’essais de Waterloo et les pistes d’atterrissage de l’aéroport de Waterloo. Le code de simulation optimisé a ensuite été exporté et utilisé pour simuler les mouvements du véhicule dans des environnements virtuels créés à l’aide du logiciel Unreal Engine 4 ainsi que d’autres de réalité virtuelle.

| L’équipe de recherche de l’Université de Waterloo utilise les logiciels Maple et MapleSim pour le développement d’un véhicule autonome. (Image: ed-diamond) |
Le modèle de groupe motopropulseur
Le modèle de groupe motopropulseur avait pour but d’obtenir une cartographie des entrées de contrôle (positions des pédales d’accélérateur et de frein) et des états du véhicule (vitesse de rotation des roues, vitesse du véhicule, etc.) jusqu’au couple appliqué aux roues. Le modèle du groupe motopropulseur hybride de la Lincoln MKZ comprenait l’architecture du module de contrôle, ainsi que la dynamique du système de transmission.
Afin d’identifier un tel modèle, l’équipe a eu besoin de mesurer de nombreux signaux du bus CAN, dont notamment les couples requis, les couples observés, ainsi que les vitesses des moteurs thermiques et électriques. Le protocole CAN est un standard de bus pour véhicule permettant aux microcontrôleurs et dispositifs de communiquer entre eux dans des applications sans ordinateur hôte.
Le modèle de dynamique véhicule avait pour but de déterminer les réactions de la voiture aux sollicitations du volant, ainsi qu’au couple transmis aux roues par la chaîne de traction. Il prenait en compte les forces d’inertie de lacet, roulis et tangage, ainsi que la cinématique de suspension et les paramètres dynamiques.
Pour effectuer le contrôle en temps réel des mouvements du véhicule, l’équipe a utilisé les fonctionnalités de réduction de modèle de MapleSim de façon à créer des modèles orientés contrôle plus simples de l’Autonomoose, embarqués dans des contrôleurs prédictifs par modèle. Ces modèles prédisent essentiellement la réaction du véhicule aux sollicitations sur un horizon de temps donné, qui sert à optimiser les sollicitations sur l’intervalle de temps suivant, comme l’explique John McPhee: «Le calcul symbolique a été utilisé pour obtenir des gradients, des lagrangiens et des hessiens exacts qui accélèrent le taux de convergence de nos méthodes d’optimisation. Les commandes prédictives à base de modèles ont été testées sur le modèle à haute-fidélité pour s’assurer du fonctionnement fiable des contrôleurs sur le véhicule réel», confie-t-il.
L’équipe a effectué un excellent contrôle longitudinal et se consacre maintenant à la résolution des problèmes de contrôle transversal, afin que le véhicule soit à même d’en éviter d’autres, ainsi que des obstacles mobiles sur la chaussée, tout en suivant son itinéraire désigné. «Cette situation nécessite une très bonne compréhension du véhicule et de la dynamique des pneumatiques, ce que nous avons pu réaliser grâce à notre modèle MapleSim et aux essais du véhicule. Lors des essais sur piste de notre contrôleur longitudinal, nous avons réussi à améliorer sensiblement la vitesse opérationnelle de l’Autonomoose», souligne John McPhee.
Une partie des idées et des données émanant du projet sont actuellement reprises dans d’autres projets de recherche d’apprentissage machine du groupe de John McPhee, comme le contrôle des exosquelettes et les robots de rééducation consécutive à un AVC, par exemple. À l’instar de l’Autonomoose, il s’agit de dispositifs d’assistance nécessitant des contrôleurs hautes performances à base de modèles qui fonctionnent en temps réels. Les futures recherches sur l’intégration de l’apprentissage machine et des contrôles à base de modèles se traduiront par de nouvelles avancées dans les performances des véhicules autonomes.

| L’Université de Waterloo est une université publique dont le campus principal est situé à Waterloo, dans la province d’Ontario au Canada. |
L’Université de Waterloo
Fondée en 1957, l’Université de Waterloo est une université publique de recherche dont le campus principal est situé à Waterloo, dans la province canadienne d’Ontario. Elle compte six facultés: sciences appliquées de la santé, arts, ingénierie, environnement, mathématiques et sciences. Elle dispose de quatre campus en Ontario (le campus principal à Waterloo, l’École d’architecture de Cambridge, le campus des sciences de la santé à Kitchener, ainsi qu’un campus des médias numériques à Stratford), ainsi que d’un campus d’ingénierie dans les Émirats arabes unis.
L’Université de Waterloo a été la première université au monde à créer une faculté de mathématiques et elle est un chef de file mondial dans la recherche sur la cryptographie, l’information quantique et la nanotechnologie. Elle a jusqu’à ce jour formé près de 190’000 étudiants provenant de 152 pays à travers le monde. L’université a également conclu des accords de partenariat avec des institutions en Chine (Suzhou), au Brésil (Campinas), au Royaume-Uni (Bristol et Cambridge), en France (Bordeaux) et en Allemagne (Duisburg-Essen).