Des abonnements
Des abonnements
La robotique conçue pour les environnements difficiles
Des techniques de conception créatives et des outils de configuration en ligne permettent de fournir des moteurs et des réducteurs personnalisés pour un bras robotique et sa pince, capables de s’adapter à une grande variété d’applications.
Le PDG de Blueprint Lab, Paul Phillips, a combiné sa passion pour l'ingénierie mécatronique avec son amour du surf et de la plongée dans l'océan. L'entreprise, située dans la banlieue de Sydney, en Australie, conçoit et fabrique des produits qui fonctionnent dans l'environnement difficile des fonds marins. Selon Paul, «j'ai réalisé très tôt que les fabricants de véhicules sous-marins avaient besoin de matériel spécialisé pour effectuer des tâches de manipulation à distance. Le développement de tels outils par eux-mêmes était prohibitif en termes de coût et de complexité. L'équipe du Blueprint Lab "aime la technologie plus que tout", c'est pourquoi nous sommes déterminés à inventer des produits techniquement innovants. Nous aimons ce que nous faisons», explique-t-il.
L'argument de vente unique des manipulateurs et des préhenseurs robotisés de la société est leur taille. Selon Paul, le Reach Alpha 5 est le plus petit manipulateur ROV (Remotely Operated Vehicle) du monde. Lorsqu'il est replié, il ne mesure que 23 x 15 x4 cm et environ 58 cm à pleine extension avec une portée dynamique de 40 cm. Le bras est capable de supporter un poids de 2 kg à pleine portée et une charge axiale de 100 kg. La force de fermeture de l'effecteur est d'environ 600 N. Les unités sont conçues pour fonctionner à des profondeurs allant jusqu'à 300 mètres (près de 1000 pieds).
En tant que complément utilisable à tout ROV, le Reach Alpha 5 est un dispositif entièrement électrique qui fonctionne à partir de 18 à 30 VDC. Le système est rapide et facile à intégrer grâce aux protocoles standard RS232/RS485. L'unité offre une détection des fuites avant le lancement du véhicule. Les effecteurs interchangeables comprennent des pinces standards, ainsi que des mâchoires quadruples, des mâchoires de récupération spécialisées, des pinces à pointeau, des mâchoires souples, des mâchoires parallèles et des mâchoires coupe-câbles. Les unités sont principalement fabriquées en aluminium AL6061 anodisé dur. Les bras et les effecteurs peuvent être fabriqués en acier inoxydable pour les environnements plus difficiles et lorsqu'une résistance accrue est nécessaire.
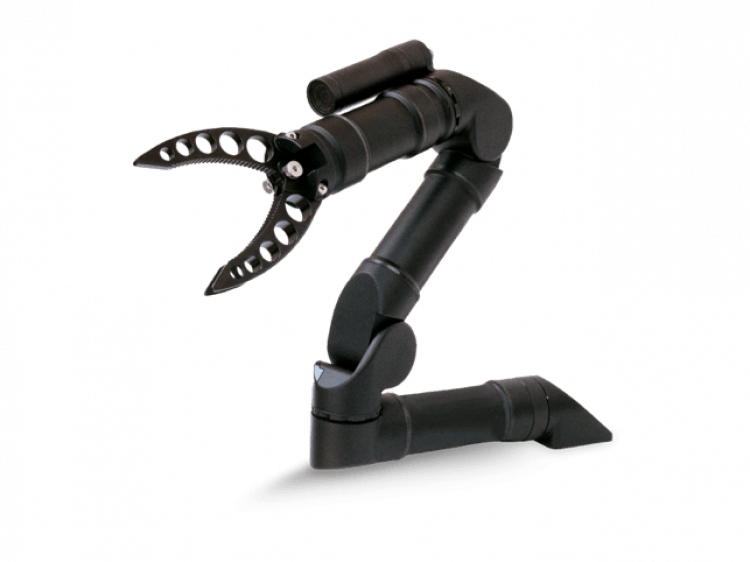
Le Reach Alpha 5 est le manipulateur sous-marin à cinq fonctions le plus léger du monde.