Des abonnements
Des abonnements
01 octobre 2014 |
La Revue POLYTECHNIQUE 08/2014 |
Automatisation
Un bus de terrain particulièrement rapide
Martin Rostan*
En tant qu’élément central de toute architecture de commande, le système de communication est largement responsable des performances, des coûts, du temps requis pour la mise en service, ainsi que de la robustesse du système complet. La technologie de bus Ethernet industriel EtherCAT répond à ces exigences.
Les réseaux classiques de l’automatisation se caractérisent par une faible quantité de données par nœud; cette quantité est souvent inférieure à la capacité utile minimale d’une trame Ethernet. Ainsi, l’utilisation d’une trame par nœud et cycle entraîne une exploitation inefficace de la largeur de bande, ainsi que des performances de réseau insuffisantes. EtherCAT adopte à cet égard une toute autre approche.


|
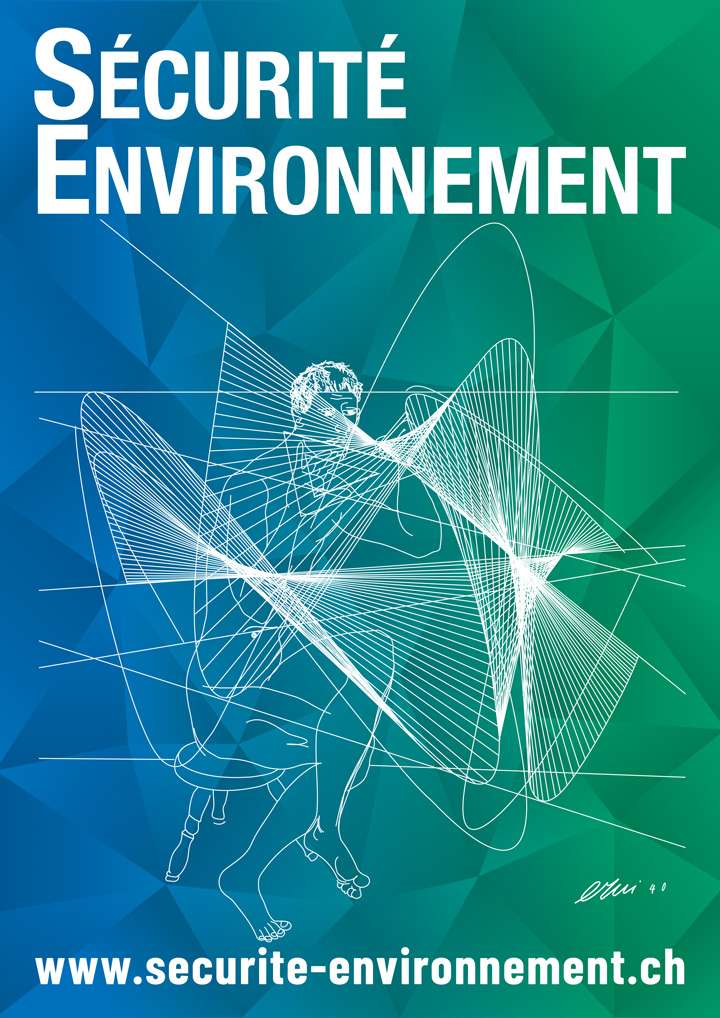
Fig. 1. Les données de processus sont insérées dans le télégramme en continu.
|
Le traitement en continu
La particularité d’EtherCAT réside dans le traitement des télégrammes Ethernet par les nœuds. Chaque nœud lit les données qui lui sont adressées puis écrit à son tour ses données dans la trame – pendant que le télégramme parcourt le réseau. Ceci augmente l’exploitation de la largeur de bande, il est inutile de disposer d’interrupteurs et de concentrateurs supplémentaires. C’est justement cette méthode de traitement des télégrammes qui rend EtherCAT si rapide.

|
Fig. 2. EtherCAT dans une trame standard Ethernet (selon IEEE 802.3).
|
Simple, souple et robuste
Sous EtherCAT, les adresses sont automatiquement attribuées, le réglage du réseau est superflu et les fonctions intégrées de diagnostic avec localisation facilitent la détection des sources d’erreurs. De plus, EtherCAT se distingue par une manipulation aisée: il ne faut configurer aucun interrupteur, le traitement d’adresses MAC ou IP est inutile.
En outre, EtherCAT convient pour des architectures centrales et décentralisées, prend en charge la communication maître/esclave, maître/maître et esclave/esclave; le système peut aussi intégrer des bus de terrain subordonnés. Avec l’EtherCAT Automation Protocol (EAP), le niveau de l’usine est également pris en charge.
EtherCAT offre tous les avantages de l’Ethernet industriel – tout en restant aussi bon marché qu’un bus de terrain, puisqu’il ne nécessite aucun composant d’infrastructure actif. Le maître ne nécessite pas de carte d’interface spéciale et les esclaves font appel à des puces hautement intégrées, disponibles auprès de nombreux fournisseurs. Il n’y a pas de coûts supplémentaires liés à la mise en service ou à l’extension du système.

|
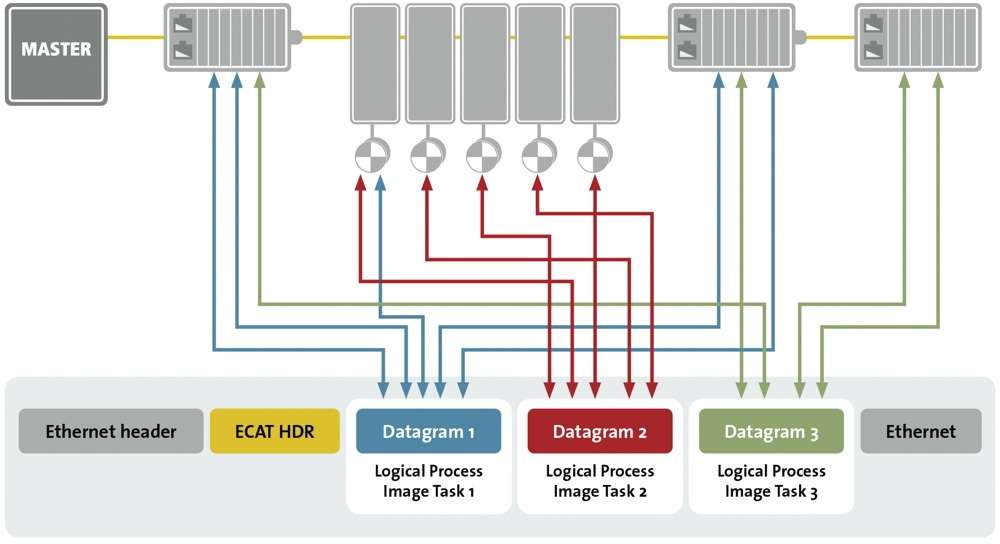
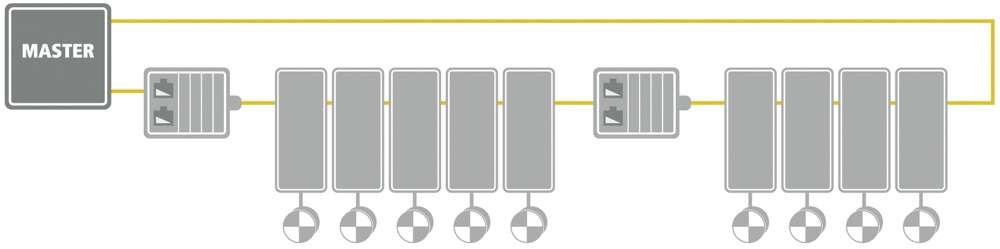
Fig. 3. Une topologie flexible – de ligne, d’arborescence ou en étoile.
|
Le protocole EtherCAT
EtherCAT utilise des trames standard Ethernet qui contiennent les données utiles. Une trame est identifiée dans le champ EtherType au moyen d’un code (0x88A4). Grâce à l’optimisation du protocole pour des données de processus à cycle court, on peut se passer de piles de protocole comme TCP/IP ou UDP/IP. En option, les connexions TCP/IP peuvent être tunnelées en parallèle via un canal de boîte vocale sans entraver le trafic en temps réel. Le mappage des données de processus est configuré lors du démarrage du maître au sein des esclaves, chaque esclave pouvant échanger de nombreuses données différentes.
La trame EtherCAT contient un ou plusieurs datagrammes, le header définissant le type d’accès que le maître souhaite au sein du réseau:
- lecture, écriture, lecture et écriture
- accès à un esclave par adressage direct ou à plusieurs esclaves par adressage logique
Chaque datagramme adresse une partie de l’image de processus au sein du segment EtherCAT, lequel présente un espace d’adressage de 4 Go dans lequel chaque esclave se voit attribuer une ou plusieurs adresses lors du démarrage du réseau. Les esclaves possédant une adresse dans la même zone sont accessibles par le biais d’un seul datagramme. Comme toutes les informations sont contenues dans les datagrammes eux-mêmes, le maître peut décider quand il accède à quelles données. Il utilise cette fonction, par exemple, pour actualiser tous les entraînements au sein du système avec de brefs temps de cycle, tout en interrogeant les E/S avec un temps de cycle plus long.
Une structure fixe de trame n’est pas prescrite pour EtherCAT, le maître doit simplement remplir une trame avec les données de sortie, puis il peut les envoyer au contrôleur MAC par accès direct automatique à la mémoire (Direct Memory Access, DMA). Le contrôleur peut à son tour copier la trame - toujours via DMA - dans la mémoire principale de l’ordinateur, la CPU n’étant ici pas sollicitée. En plus des données cycliques, d’autres datagrammes peuvent être insérés pour permettre une communication asynchrone ou à la demande.
Outre l’adressage logique, le maître peut adresser un esclave sur base de sa position au sein du réseau, ceci étant utilisé pour déterminer la topologie du réseau lors du démarrage. Suite au contrôle, le maître peut attribuer une adresse fixe à chaque nœud, permettant l’accès à ceux-ci. L’accès ciblé aux périphériques est ainsi possible en cours de service, y compris en cas de changement de la topologie.
La communication entre les esclaves peut se faire de deux manières. Un esclave peut envoyer des données directes à un autre esclave lié plus en aval dans le réseau. En raison du traitement des trames dans le sens du flux, cette communication, qui dépend de la topologie, convient tout particulièrement aux concepts de machines fixes. Par contre, la communication librement configurée entre esclaves se fait via le maître. Cette communication nécessite certes deux cycles de bus, mais ceci est néanmoins plus rapide qu’avec les autres approches.

|
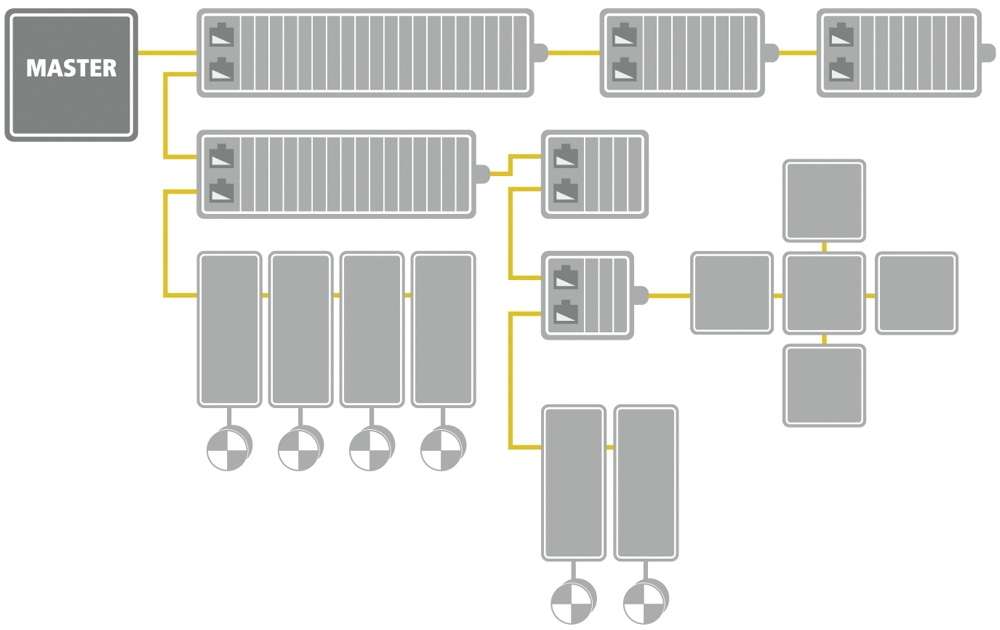
Fig. 4. La synchronisation des participants se fait entièrement sur base matérielle; les temporisations du temps d’exécution sont mesurées et compensées.
|
Une synchronisation ultrarapide
EtherCAT effectue une synchronisation en l’espace de quelques nanosecondes, ce qui constitue un avantage majeur pour les applications dans lesquelles le système cible est piloté ou mesuré via le système de bus. Les temps de réaction rapides réduisent également les temps d’attente lors de la transmission des différentes étapes du processus, ce qui rend l’application nettement plus efficace. Enfin, l’architecture de commande d’EtherCAT réduit la charge de la CPU en moyenne de 25 à 30 % par rapport à d’autres systèmes de bus (pour un même temps de cycle).
Communication au sein de l’installation
Optimisé pour les données de processus, le protocole EtherCAT est transmis directement dans la trame standard Ethernet (IEEE 802.3). Il peut se composer de plusieurs sous-télégrammes, dont chacun couvre une zone de mémoire spécifique de l’image de processus logique. La séquence de données reste indépendante de l’arrangement physique des nœuds au sein du réseau – l’adressage peut se faire dans n’importe quel ordre. La diffusion, la multidiffusion et la communication entre esclaves sont possibles et exécutées par le maître. Si un routage IP est nécessaire, le protocole EtherCAT peut être inséré dans les datagrammes UDP/IP, ce qui permet à toute commande dotée d’une pile de protocoles Ethernet d’accéder aux systèmes EtherCAT.

|
Fig. 5. Redondance de câble avantageuse avec des esclaves standard EtherCAT.
|
Une topologie flexible
Avec les applications EtherCAT, c’est la structure de l’installation qui détermine la topologie de réseau. Comme EtherCAT ne nécessite en général pas de concentrateurs ni d’interrupteurs, aucune restriction ne s’applique ici: les topologies de ligne, d’arborescence ou en étoile ainsi que toutes leurs combinaisons sont réalisables avec un nombre quasi illimité de nœuds. Grâce à la reconnaissance automatique de liens, les nœuds et les segments peuvent être débranchés puis à nouveau raccordés – même sur un autre point - en cours de service. La topologie de ligne peut être bouclée pour réaliser une redondance de câble. Le maître a simplement besoin d’un second port Ethernet pour cette redondance, les périphériques esclaves prennent d’emblée en charge la redondance de câble. EtherCAT utilise des câbles et connecteurs standard Ethernet industriel.
Des horloges distribuées
La synchronisation précise des participants au réseau fait appel à un mécanisme d’horloges distribuées, les fameuses Distributed Clocks (DC). L’instabilité générée dans le système est nettement inférieure à 1 µs. La synchronisation des horloges au sein des participants s’effectue entièrement côté matériel. L’heure du premier esclave travaillant de manière synchrone est distribuée par cycles aux autres horloges du système, lesquelles sont ainsi réglées exactement sur l’horloge de référence. Comme les informations de l’horloge de référence ne parviennent aux autres horloges du cycle qu’avec un certain retard dû à la temporisation du temps d’exécution sur le câble et au sein des participants, cette temporisation est mesurée individuellement pour chaque esclave, puis compensée pour garantir le synchronisme ainsi que la simultanéité. Avec EtherCAT, cette dernière est également largement inférieure à 1 µs. Le maître est lui aussi moins fortement sollicité avec l’utilisation des DC, il doit simplement veiller à ce que le télégramme EtherCAT soit envoyé suffisamment tôt, avant que le signal DC au sein des esclaves ne déclenche l’activation des sorties.

|
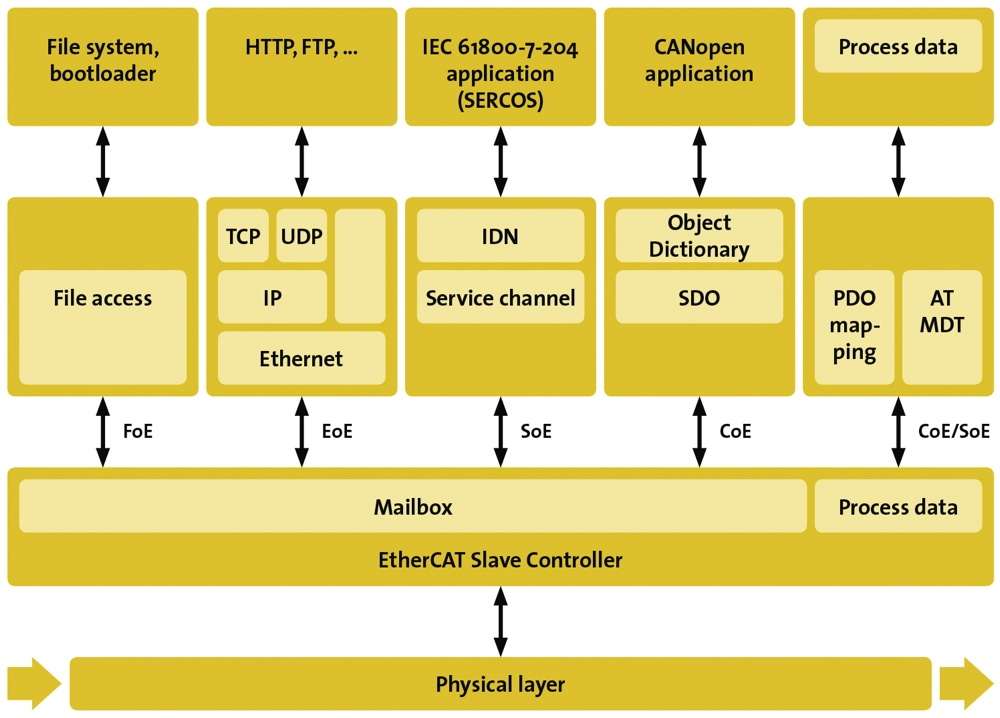
Fig. 6. Différents profils de communication peuvent être réalisés l’un à côté de l’autre.
|
Diagnostic et localisation d’erreur
Les propriétés de diagnostic visant à la détection et à la localisation des erreurs sont importantes pour la disponibilité d’une machine et le temps requis pour sa mise en service. EtherCAT prend en charge la lecture et la comparaison de la topologie de réseau actuelle et de celle prévue, lors du démarrage; la technologie dispose en outre, au sein du système, de nombreuses possibilités de diagnostic. Dans les nœuds, la commande esclave EtherCAT recherche les erreurs dans la trame en cours, à l’aide d’une somme de contrôle. Si une erreur de bit venait à se présenter, un compteur d’erreurs est incrémenté et les nœuds suivants sont informés de cette erreur. Le maître reconnaît également la trame défectueuse et supprime ses informations. Avec l’analyse du compteur d’erreurs dans les nœuds, le maître peut en outre localiser l’erreur. Au sein des trames, un compteur (Working Counter) veille à l’analyse de la consistance de chaque datagramme: chaque nœud adressé et dont la mémoire est accessible incrémente automatiquement le Working Counter. Le maître peut ensuite confirmer de manière cyclique que tous les nœuds fonctionnent sur une base de données consistante. Dès que le Working Counter présente une autre valeur que celle prédéfinie, les données du datagramme concerné ne sont pas transmises à l’application maître. En s’aidant de l’état et des informations sur l’erreur provenant du nœud, ainsi que l’état du lien, le maître reconnaît automatiquement le motif de ce comportement inattendu au sein du réseau. Comme EtherCAT fait appel à des trames standard Ethernet, le trafic réseau Ethernet peut être enregistré à l’aide d’outils logiciels gratuits. Par exemple, le logiciel Wireshark dispose d’un interpréteur de protocole pour EtherCAT, de sorte que les informations spécifiques au protocole – le Working Counter, p. ex. - puissent être affichées en texte clair. EtherCAT permet de détecter et de localiser des défauts avant même que le problème n’agisse sur le fonctionnement de la machine.

|
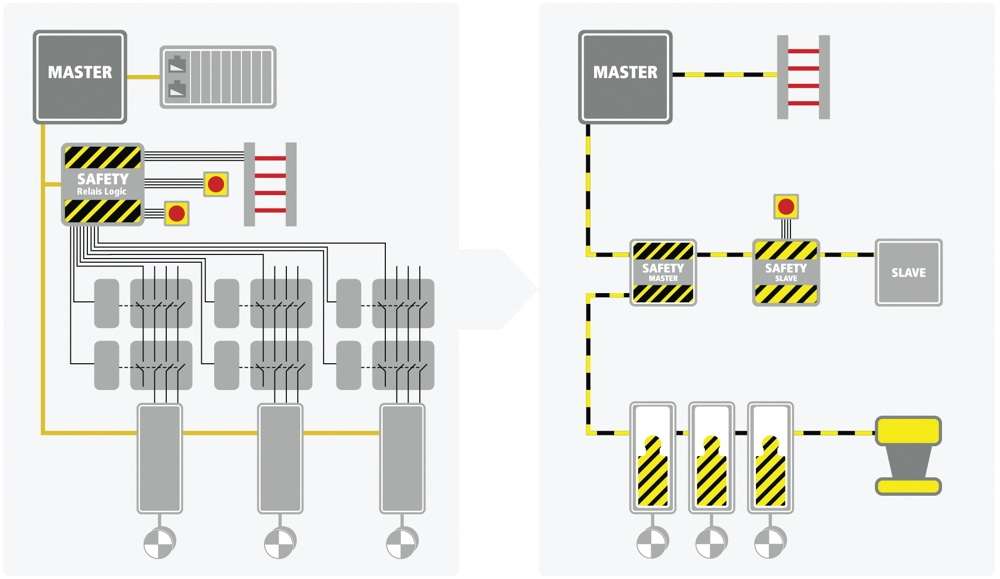
Fig. 7. Par rapport au câblage E/S sécurisé conventionnel, la mise en œuvre de Safety-over-EtherCAT permet des architectures nettement plus simples et plus souples.
|
Une disponibilité élevée
EtherCAT permet une redondance de câble avec des moyens simples. Un câble de connexion entre le dernier nœud et un port Ethernet supplémentaire côté maître permet d’étendre la topologie de ligne à une topologie en anneau. Un cas de redondance –rupture de câble ou défaut de nœud, p. ex. – est reconnu au moyen d’un add-on logiciel dans la pile du maître. Il n’est pas nécessaire de modifier les nœuds eux-mêmes, ils ne «savent» pas qu’ils sont exploités au sein d’un réseau redondant. Au sein des esclaves, la détection de lien étudie et supprime automatiquement les cas de redondance. Avec un temps de récupération < 15 μs, c’est tout au plus un seul cycle qui risque d’être perturbé. Même les applications de mouvement avec leurs temps de cycle très brefs peuvent continuer à fonctionner en continu en cas de rupture de câble. EtherCAT permet même de réaliser la redondance de maître avec les fonctions Hot Standby. En outre, les composants mis en danger –ceux reliés par une chaîne guide-câble, p. ex. - sont câblés par le biais d’une ligne de dérivation, de sorte qu’en cas de rupture de câble, le reste de la machine continue de fonctionner.
Profils de communication
Pour la configuration et le diagnostic des périphériques esclaves, il est possible d’accéder aux variables fournies pour le réseau par le biais d’une communication acyclique. La base pour ce faire est un protocole de boîte vocale fiable avec fonction de restauration automatique des télégrammes défectueux. Pour prendre en charge une grande variété de périphériques et de nombreuses couches d’application, les profils de communication ci-dessous ont été définis pour EtherCAT, sur la base du canal Mailbox:
- CAN application protocol over EtherCAT (CoE)
- profils Servo entraînement selon CEI 61800-7-204 (SoE)
- Ethernet over EtherCAT (EoE)
- File Access over EtherCAT (FoE)
Un esclave ne doit pas prendre en charge tous les profils de communication; il peut, par contre, décider du profil qui convient le mieux à ses exigences. Le maître est au courant des profils mis en œuvre via le fichier de description de périphérique.
Le protocole CoE est particulièrement important, car EtherCAT fournit avec lui les mêmes mécanismes de communication que la norme CANopen® EN 50325-4: répertoire d’objets, mappage PDO (Process Data Objects) et SDO (Service Data Objects) – même la gestion du réseau est comparable. Ainsi, EtherCAT peut être mis en œuvre sans grands frais sur des périphériques qui étaient auparavant équipés de CANopen; une grande partie du micro-logiciel CANopen est réutilisable. En option, les objets peuvent être étendus pour, d’une part, lever la restriction des 8 octets et, d’autre part, permettre la lisibilité totale du répertoire d’objets. On tient ainsi compte de la plus grande largeur de bande d’EtherCAT. Les profils de périphérique, comme le profil d’entraînement CiA 402, p. ex., peuvent également être réutilisés pour EtherCAT.

|
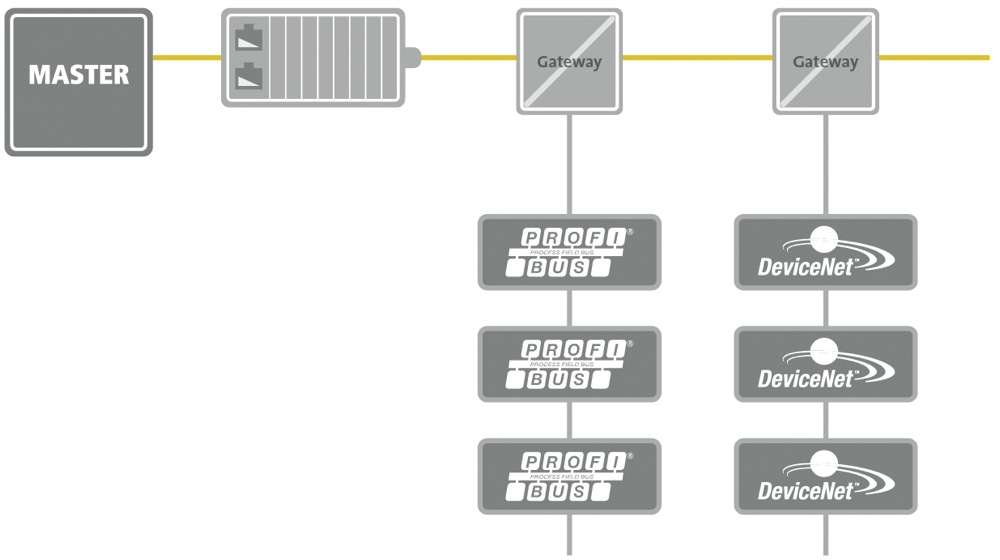
Fig. 8. EtherCAT permet l’intégration d’interfaces de bus de terrain décentralisées.
|
Sécurité incluse
Grâce à Functional Safety over EtherCAT (FSoE), la sécurité fonctionnelle en tant que partie intégrante d’une architecture de réseau ne pose plus problème. FSoE est déjà mis en œuvre dans des périphériques certifiés TÜV depuis 2005. Le protocole est normalisé au niveau international, il satisfait aux exigences des systèmes SIL 3 et convient tant pour les systèmes de commande centraux, que pour ceux décentralisés. La fameuse approche Black Channel - selon laquelle le support de transport n’est pas impliqué dans l’évaluation de la sécurité - et le design particulièrement élancé du boîtier de sécurité permettent d’utiliser FSoE aussi dans d’autres systèmes de bus. Cette approche intégrée et le protocole élancé aident à garder les coûts pour le système à un faible niveau. En outre, une commande non critique au point de vue sécurité peut également recevoir et traiter des données de sécurité.
Avec EtherCAT également, il faut bien entendu appliquer des mesures de protection contre l’abus négligent et prémédité des réseaux d’automatisation. Comme le protocole EtherCAT repose directement sur la trame Ethernet et n’est lui-même pas sur base IP, le moyen de transport le plus courant est insensible aux cyber-attaques. Les périphériques EtherCAT ne nécessitent pas de pile TCP/IP pour la communication, ce qui permet non seulement d’économiser les frais, mais également d’échapper d’emblée à la plupart des problèmes de sécurité. Les protocoles sur base IP sont tunnelés par EtherCAT, le segment EtherCAT représentant une zone dans laquelle il suffit de protéger «l’entrée du tunnel» pour garder le réseau complet bien propre. Comme les concentrateurs et interrupteurs sont inutiles avec EtherCAT, on évite les attaques par des «entrées latérales».
Intégration d’autres systèmes de bus
Il existe des passerelles permettant d’intégrer les composants de bus de terrain existants dans les réseaux EtherCAT. D’autres protocoles Ethernet peuvent cependant être utilisés en rapport avec EtherCAT: les trames Ethernet sont tunnelées via le protocole EtherCAT, lequel représente l’approche par défaut pour les applications Internet. Le réseau EtherCAT est entièrement transparent pour le périphérique Ethernet et les propriétés de temps réel ne sont pas entravées, puisque le maître spécifie précisément quand les transmissions tunnelées doivent avoir lieu et dans quelle mesure les protocoles tunnelés peuvent exploiter la capacité de 100 Mbit/s. Par conséquent, toutes les technologies Internet peuvent également être utilisées dans l’environnement EtherCAT: serveur Web intégré, e-mail, transfert FTP, etc.

|
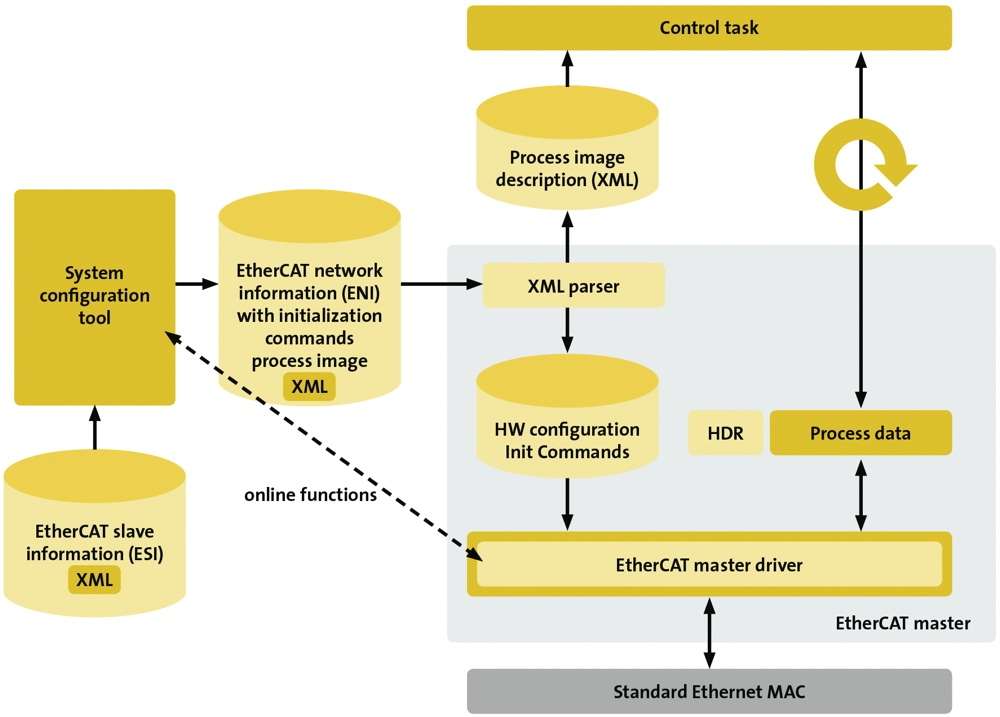
Fig. 9. Une architecture typique pour maître EtherCAT.
|
Mise en œuvre
Dans le logiciel, les maîtres peuvent être mis en œuvre sur chaque standard Ethernet MAC. De nombreux fournisseurs proposent un code pour les différents systèmes d’exploitation. De plus, il existe de nombreuses mises en œuvre ouvertes et sources partagées. Pour pouvoir exécuter le principe Processing on the Fly (traitement en continu), on utilise des puces spéciales de commande esclave EtherCAT pour tous les périphériques esclaves, les commandes esclave EtherCAT étant disponibles auprès de nombreux fournisseurs, comme code pour différents types FPGA et comme mises en œuvre ASIC.
L’EtherCAT Technology Group
L’EtherCAT Technology Group (ETG) fut fondé en 2003 pour l’assistance mondiale de la technologie EtherCAT et de tous ceux qui l’utilisent. Avec plus de 2700 membres issus de quelque 60 pays, le groupe est aujourd’hui la plus grande organisation Ethernet Industrial et bus de terrain au monde. En Amérique, en Chine, en Allemagne, au Japon et en Corée, les membres du groupe assurent l’assistance mondiale pour les constructeurs de machines, les fabricants d’appareils, les intégrateurs de systèmes et les fournisseurs de technologie – cela avant, pendant et après la mise en œuvre. Dans les différents groupes de travail (TWG, Technical Working Group) de l’ETG, des experts travaillent sur différents aspects de la technologie, comme la définition de profils de périphériques ou de directives de mise en œuvre, p. ex.
L’ETG organise dans le monde entier des séminaires et des ateliers. Il représente EtherCAT sur les salons et foires internationaux. L’organisation propose, en outre, des guides produits, des stands communs sur les foires et des participations à des séminaires, cela dans le but de seconder activement ses membres lors du lancement des produits EtherCAT sur le marché.
Interopérabilité et conformité
L’ETG organise chaque année des Plug Fests en Amérique, en Asie et en Europe. Lors de ces manifestations, les développeurs d’appareils EtherCAT se rassemblent pour tester leurs produits et garantir leur interopérabilité. Grâce à la mise en œuvre des outils d’essai de conformité EtherCAT, les fabricants ont la possibilité de tester eux-mêmes la conformité de leurs périphériques EtherCAT avant la présentation sur le marché. Les centres d’essai agréés proposent également des tests de conformité; si ceux-ci sont fructueux, les fabricants y obtiennent un certificat de conformité officiel.
Standardisation internationale
EtherCAT est une technique ouverte et normalisée sur la scène internationale – chacun peut utiliser cette technologie sous une forme compatible. L’EtherCAT Technology Group est un partenaire officiel de la CEI. Tant EtherCAT que Safety-over-EtherCAT sont des normes CEI (CEI 61158 et CEI 61784). Ces normes ne contiennent pas uniquement les couches inférieures de protocole, mais également les couches d’application, ainsi que les profils de périphériques comme pour les entraînements, p. ex. De plus, la SEMI™ (Semiconductor Equipment and Materials International) a accepté EtherCAT comme norme de communication pour l’industrie des semi-conducteurs (E54.20).
Les différents groupes de travail au sein de l’ETG Semiconductor Technical Working Group (TWG) définissent des profils spéciaux de périphériques et des directives de mise en œuvre spécifiques au secteur. La spécification générale EtherCAT est disponible en anglais ainsi qu’en japonais, en coréen et en chinois.
www.ethercat.org
* Directeur exécutif, EtherCAT Technology Group, Nuremberg (D)