Des abonnements
Des abonnements
14 septembre 2015 |
La Revue POLYTECHNIQUE 06/2015 |
Robotique
Un drone qui se déploie en une fraction de seconde
Une fraction de seconde est nécessaire à ce quadrirotor pliable pour étendre ses bras articulés grâce à la force de ses hélices et prendre son envol. Ce prototype a été présenté à la Conférence internationale sur la robotique et l’automatisation à Seattle, devant un parterre de spécialistes.
Inspiré de l’origami, le drone pliable mis au point par une équipe de l’EPFL et du NCCR Robotics se déploie et prend son envol en une fraction de seconde. A peine mises en marche, les hélices s’enclenchent, les bras articulés s’étendent et l’engin est prêt à partir en mission. Léger, il peut être transporté dans un sac et déployé en un tour de main, sans aucun montage. Cet engin pourrait donc être rapidement lâché en essaim sur une zone sinistrée pour en rapporter des images et entrer en communication avec des personnes en difficultés.


|
Stefano Mintchev présente son drone quadrirotor.
|
Exploiter la force des hélices
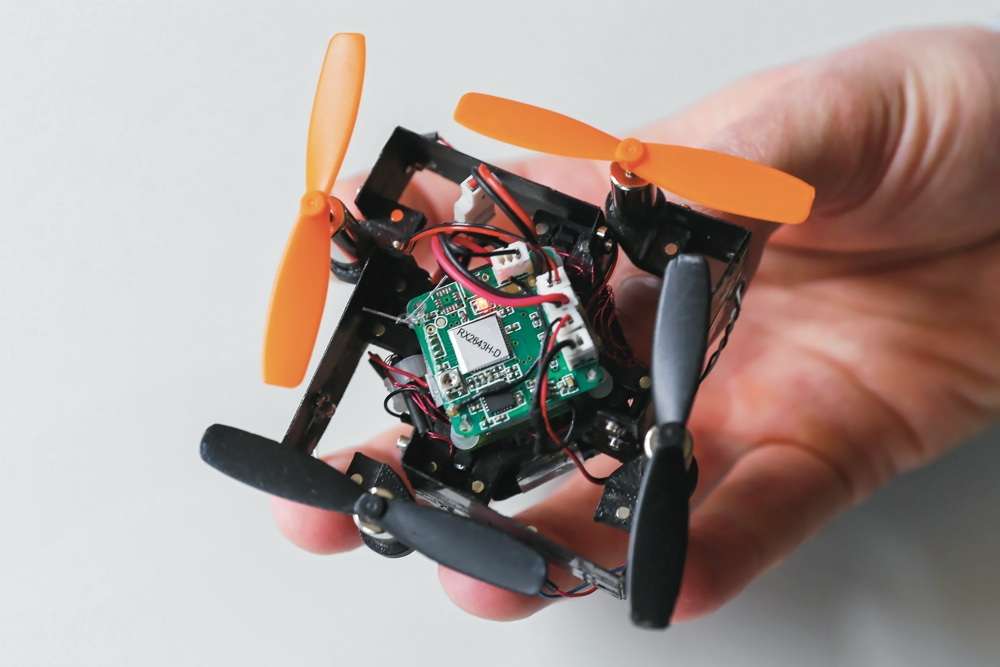
Les bras, en fibre de verre et tissu de polyester, léger et non extensible, ont une forme trapézoïdale en position repliée. Au repos, ils sont enroulés horizontalement autour du corps de l’appareil. L’astuce pour permettre un dépliage autonome est intrinsèque à l’appareil: il s’agit d’exploiter la force générée par les hélices pour enclencher un mouvement. En tournant toutes dans le même sens, elles provoquent une rotation des bras dans le sens inverse. Cela a pour effet de les ouvrir autour de deux plis verticaux. Lorsque les bras sont en extension complète, leur partie supérieure se rabat horizontalement et verrouille le segment. Le tout est maintenu par de petits aimants.
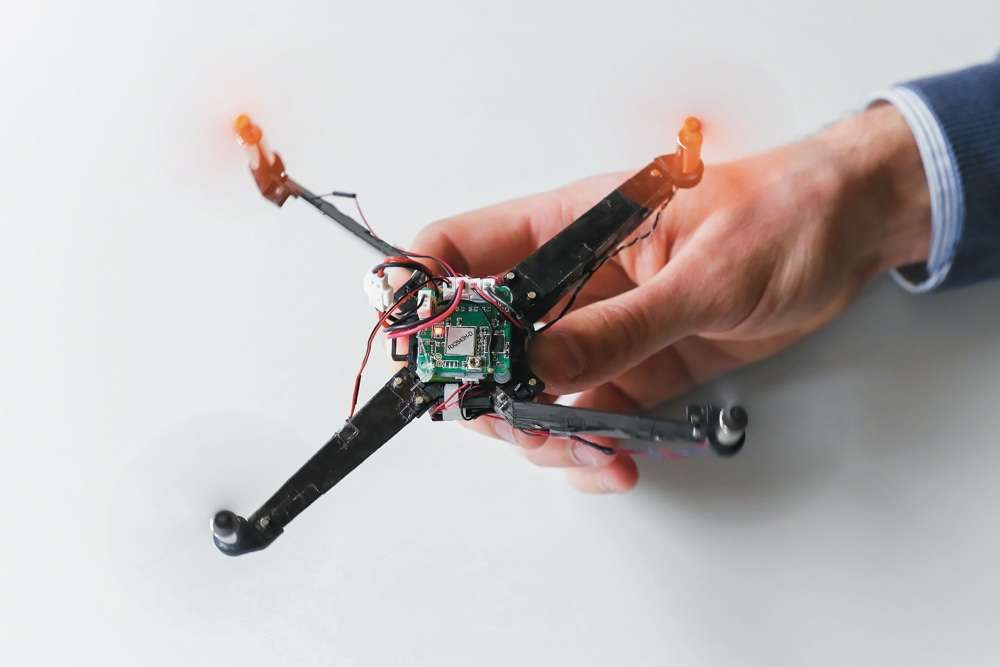
Mais le vol stable d’un quadrirotor nécessite que deux hélices diagonalement opposées tournent dans le sens des aiguilles d’une montre, et les deux autres dans le sens contraire. Ce drone possède donc un capteur qui permet l’inversion du sens de rotation de deux des rotors avant l’envol. Cette opération se déroule automatiquement en moins de 50 millisecondes après que le capteur ait détecté le verrouillage des bras. Cet ingénieux système fait l’objet d’un brevet. Il a été présenté le 25 mai à la Conférence internationale sur la robotique et l’automatisation à Seattle, qui a rassemblé 2000 spécialistes de la robotique.

|
Le drone replié tient dans la main.
|
Une rigidité naturelle
Ce champion du déploiement simple en apparence recèle cependant un assemblage de divers éléments optimisés. La rigidité des appendices, par exemple, est un paramètre critique pour assurer la manœuvrabilité d’un quadrirotor. Des membres trop flexibles pourraient se plier et vibrer durant le vol, causant de l’instabilité et réduisant le temps de réaction du quadrirotor aux commandes extérieures. Avec ce design, la rigidité des bras est directement incluse dans leur pliage et leur déploiement horizontal permet d’éviter des déséquilibres dus aux lois de la gravitation. Aucun mécanisme additionnel de renforcement ne vient donc alourdir l’engin.
Par ailleurs, cette solution a l’avantage d’être réversible. «Le repli est encore manuel pour ce prototype, mais un utilisateur entraîné n’a besoin que de moins de 10 secondes pour le replier», estime son concepteur, Stefano Mintchev, qui envisage déjà une version qui se replie sans aucune aide.
Le travail futur se concentrera sur l’optimisation. Il s’agira notamment de réduire encore son poids afin d’en réaliser de plus gros, et d’améliorer la résilience des bras contre les collisions. Avec des ailes, une cage de protection ou autre, le principe de pliage origamique issu du Laboratoire de systèmes intelligents, piloté par Dario Floreano, pourrait bientôt être appliqué à d’autres types d’engins volants.

|
Le drone quadrirotor se déplie.
|
EPFL
1015 Lausanne
Stefano Mintchev
Tél.: 021 693 05 91 / 078 841 86 23
stefano.mintchev@epfl.ch